

课程简介 随着自动驾驶技术的快速发展,C++作为一门高效、灵活的编程语言,在自动驾驶系统的开发中扮演着至关重要的角色。 带你了解如何从C++基础到实战,逐步掌握面向自动驾驶的C++编程技能。 课程下载
 2025-07-30
2025-07-30
课程简介 计算机视觉的最终体现是三维视觉,而三维视觉的表达方式则是点云,点云处理在整个三维视觉领域占有非常重要的地位,几乎涉及到所有相关领域,例如自动驾驶感知定位、SLAM、三维场景重建、AR/VR、SFM、姿态估计、三维识别、结构光、立体视觉、三维测量、视觉引导等。近年来,无论是学术界还是工业界
2025-04-14
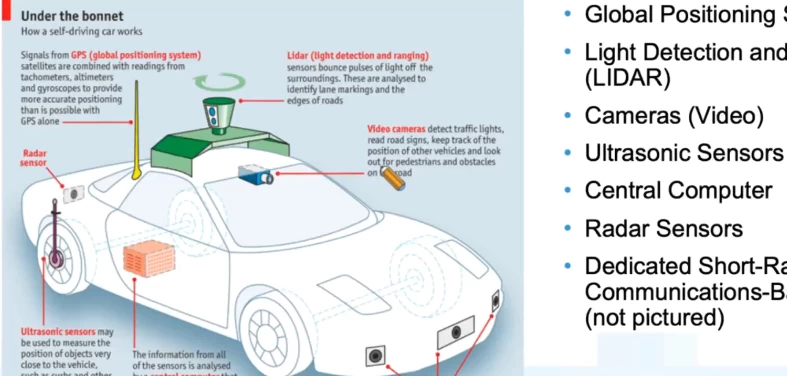
课程简介 这是一门AI自动驾驶算法工程师的视频课程,课程内容包括深度学习、计算机视觉、传感器融合、路径规划等核心技术。 通过理论与实践相结合的方式,帮助学员掌握自动驾驶算法开发与调试的方法和技巧,培养解决实际问题的能力,并提供实例项目进行实践操作。 课程下载
2025-03-29

课程简介 自动驾驶规划控制模块负责输出油门/刹车、方向盘的组合操作,直接决定着自动驾驶的安全性及舒适度。 由于自身的假设以及建模方法不同,各类规划控制方法均存在优劣且适用于不同的场景,比如低速或者高速、直道或者弯道。尽管一些博客文章对部分算法的原理做了简要介绍,但依然没有系统梳理算法的原理推
2024-12-10

课程简介 多传感器融合已成为自动驾驶及机器人的主流定位方案,涉及内容广泛且繁杂,包括传感器的标定、数据处理、SLAM、滤波等。 自学入门难度比较大,通过本课程不仅能够入门最困难的传感器IMU,为后续深入学习打下坚实基础,并且可以学习到3D Lidar SLAM的前沿成果。 在ROS框架
2024-10-13